
Notion de tenseur de contrainte à trois dimensions
Nous considérons en première abord dv un volume infiniment
petit. Examinons les forces qui s’exercent sur ce volume. Il y a équilibre des
forces entre :
Le poids de l’élément et s’il y a mouvement ou vibration la
force d’inertie. Les deux quantités sont proportionnelles à dv, donc du
3ème ordre (dimension d’un volume).
Les forces de tension qui s’exercent sur la surface limite.
Ces forces sont proportionnelles à ds, donc du 2ème ordre (dimension
d’une surface). Les forces de volume sont donc d’un ordre supérieur par rapport
aux forces de surface, donc, dans ce raisonnement portant sur des quantités
infiniment petites, les forces de volume sont négligeables par rapport aux
forces de surface.
Pour qu’il y ait équilibre, il faut que les forces de tension
s’équilibrent entre elles. Ceci posé, on peut ainsi écrire la première
condition d’équilibre :
Soit dv le tétraèdre OABC dont les trois faces forment un trièdre orthogonal (figure ci-dessous).
Soit ν le normale extérieure à ABC, on a :
Aire ABC = S
BOC = Sx
= S cos(ν, ox)
COA = Sy
= S cos(ν, oy)
AOB = Sz
= S cos(ν, oz)

Cette figure illustre la notion de tenseur des tensions en O.
Le vecteur tension dépend de l’orientation de la normale à la surface
élémentaire ABC. Il faudra donc trois vecteurs et leurs neuf composantes cartésiennes
pour le définir complètement. Source@ Geophysique.
Si l’on remarque que BOC a −x pour normale extérieure et que τ(−x) = −τ(x), la première condition d’équilibre s’écrit :
τνS
− τxSx
− τySy − τzSz =
0
où,
τ(ν) = τx cos(ν, x) + τy cos(ν, y) + τz cos(ν, z)
Il en résulte que τν est connue pour toute
direction ν dès que l’on se donne les 3 tensions particulières τ(x), τ(y),
τ(z).
Cette association en un point du corps, d’un vecteur τν
à toute direction suivant une « relation linéaire et homogène par
rapport aux cosinus directeurs de ν traduit le concept général de
tenseur ».
On dit que τν
est la composante du tenseur des tensions suivant la direction ν. Les 3
composantes des 3 vecteurs qui définissent le tenseur sont :
τ(x) τxx τxy τxz
τ(y) τyx τyy τyz
τ(z) τzx τzy τzz
Pour la deuxième
condition d’équilibre on considère un volume infinitésimal en forme de cube
dont les arêtes sont parallèles aux axes Oxyz (figure ci-dessous).
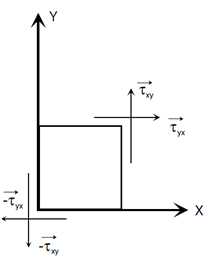
Cette figure illustre la nullité du moment par rapport aux
axes de coordonnées permet de ramener à six, grâce aux propriétés de symétrie,
le nombre des paramètres nécessaires pour définir le tenseur des tensions.
@Geophysique.
Le moment par rapport à OZ des forces de tension
provient des forces±τyx dS et ±τxy dS qui s’exercent sur les 4 faces du cube. Ce moment
est nul si τxy = τyx. Par un raisonnement identique on
a τzy = τyz et τxz = τzx.
Ainsi, le tenseur des tensions est symétrique. Sa matrice
admet une diagonale comme axe de symétrie. Il suffit donc de six nombres et non
de neuf, pour définir complètement le tenseur des tensions.
Aucun commentaire:
Enregistrer un commentaire